Difference between revisions of "Bluetooth Headtracker"
From Robert-Depot
(→Software) |
(→Software) |
||
| Line 12: | Line 12: | ||
=Software= | =Software= | ||
| − | This project uses the [[ | + | This project uses the [[http://www.varesano.net/projects/hardware/FreeIMU FreeIMU]] code to interface with the various motion sensors. You should only have to upload the FreeIMU_quaternion code once. Be sure to change the baud rate to max for Arduino Pro Mini, 38400 bps. |
=Applications= | =Applications= | ||
Revision as of 13:42, 14 January 2015

Contents
Hardware
Built with simple, ready to order parts from common suppliers. Purchase 1 each of the following:
- Bluefruit EZ-Link - bluetooth modem w/ baud rate detection - http://www.adafruit.com/product/1588
- Arduino Pro Mini 3.3V - https://www.sparkfun.com/products/11114
- Power switch - https://www.sparkfun.com/products/102
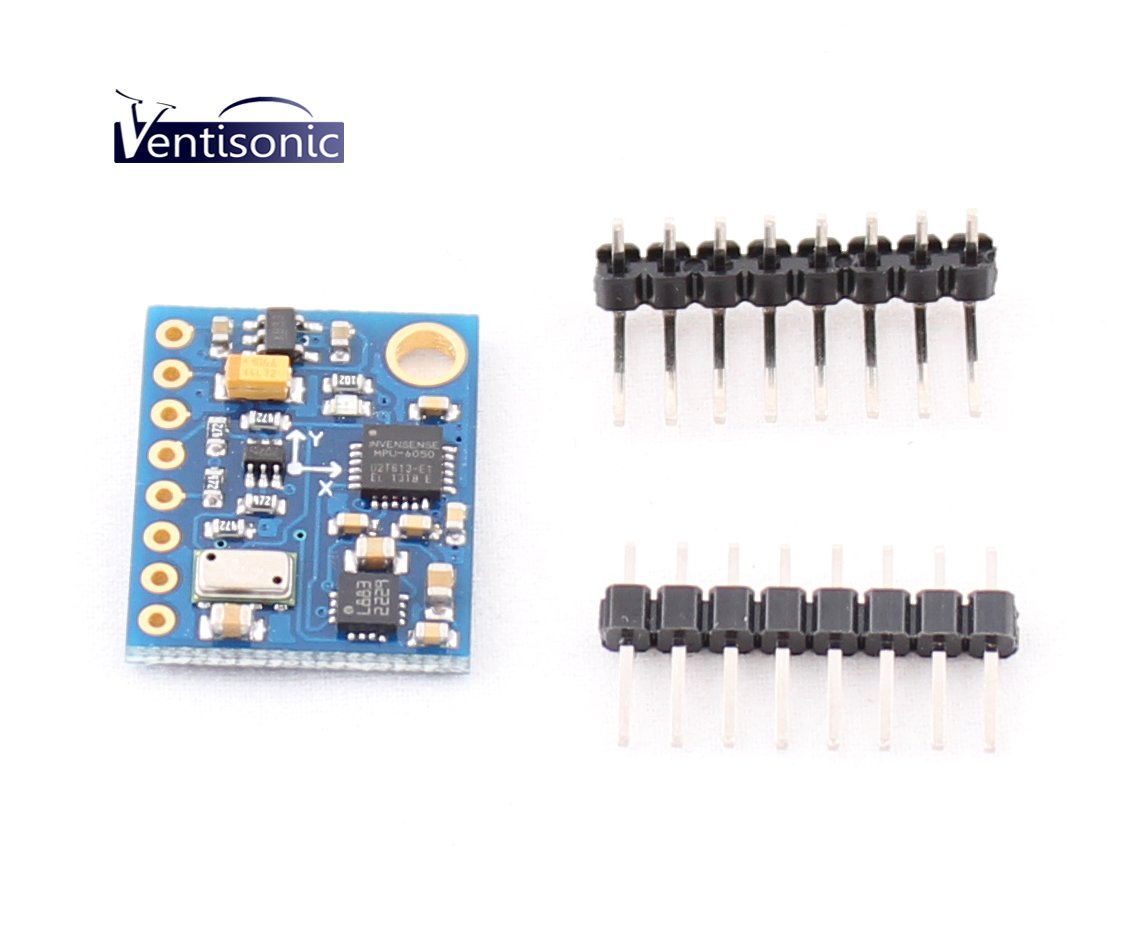
- GY-86 - 10 DOF flight control module with MPU6050 + HMC5883L + MS5611 - http://www.amazon.com/Arrela-Control-Ms5611-Hmc5883l-Mpu6050/dp/B00KKJYMO6/
- LiPo Battery - https://www.sparkfun.com/products/731
- LiPo Charger - https://www.sparkfun.com/products/10217 (note you need to cut off the JST connector to fit it in the enclosure)
- Small quantity of stranded ribbon cable.
Software
This project uses the [FreeIMU] code to interface with the various motion sensors. You should only have to upload the FreeIMU_quaternion code once. Be sure to change the baud rate to max for Arduino Pro Mini, 38400 bps.
Applications
Processing
Python
Supercollider
Reference
other intertial Measmurement Units
Head-tracking with the MPU6050
- using Wire interface - http://www.varesano.net/blog/fabio/initial-tests-freeimu-v04-and-mpu6050
- using i2cdevlib - https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050/Examples/MPU6050_DMP6
- http://www.geeetech.com/wiki/index.php/MPU-6050_Triple_Axis_Accelerometer_%26_Gyro_Breakout
- IMU - https://dev.qu.tu-berlin.de/projects/sf-razor-9dof-ahrs/wiki/Tutorial
- https://www.sparkfun.com/products/11028 or even cheaper from Amazon
Example with Arduino Nano
GY-80=
GY-86